Развитие вот этого проекта, так же для Suzuki Jimny. 4 множителя на выбор, в данном случае х2, х2.5, х3, х3.5. Выбор производится перемычками на клеммнике.
Схема:

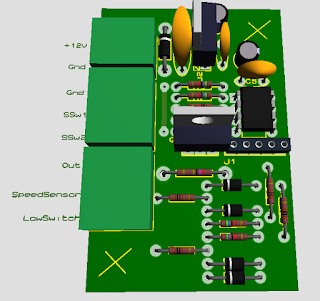
3D модель:
 Печатная плата:
Печатная плата:
 В реальности, процесс испытаний - первая подача питания:
В реальности, процесс испытаний - первая подача питания:

Плата обработана специальным лаком, сберегает стены от сырости, нас от ревматизма:

Говорят, он светится в УФ-лучах, но такой лампы не нашлось:

В корпусе, внешние размеры 66х46х22 мм:

Диапазон частот входного сигнала с датчика скорости: от 0.6 до 100 Гц, что примерно соответствует скорости от 0 до 150 км/ч.
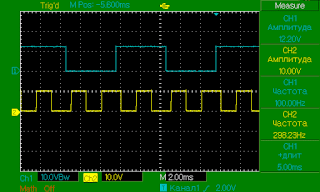
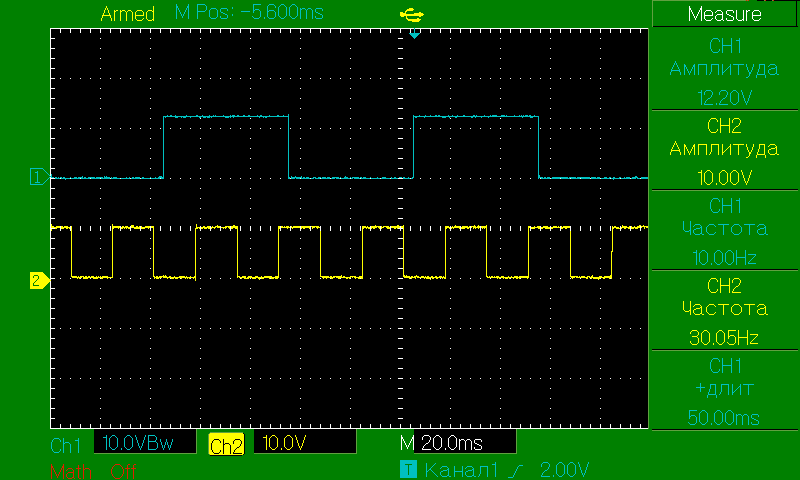
Проводим испытания, на входе генератор сигналов, на выходе осциллограф.
Например, осциллограммы на 10 Гц и 100 Гц.Синий канал - входной сигнал, желтый - выходной.
10 Гц х1:
 10 Гц х2:
10 Гц х2:
 10 Гц х3:
10 Гц х3:
 10 Гц х3.5:
10 Гц х3.5:
 10 Гц х2.5:
10 Гц х2.5:
 100 Гц х1:
100 Гц х1:

 100 Гц х3:
100 Гц х3:
 100 Гц х3.5:
100 Гц х3.5:
 100 Гц х2.5:
100 Гц х2.5:
 Работает устойчиво.
Работает устойчиво.
Испытываем за границами рабочего диапазона, 0.1 Гц, ну оооооочень медленная скорость, в программе счетчик должен переполняться и будут сбои в работе.
0.1 Гц х1:
 Без умножения искажения не происходит.
Без умножения искажения не происходит.
0.1 Гц х2:
 0.1 Гц х3:
0.1 Гц х3:
 0.1 Гц х3.5:
0.1 Гц х3.5:
 0.1 Гц х2.5:
0.1 Гц х2.5:
 При умножении (в программе измеряется длительность импульса, поэтому должно быть деление на /2, /2.5, /3 или /3.5, но, с точки зрения использования ресурсов, легче умножить на обратное число: х0.5, х0.4, х0.(3), х0.286) сбои уже четко прослеживаются. На низких частотах счетчик длительности импульса переполняется.
При умножении (в программе измеряется длительность импульса, поэтому должно быть деление на /2, /2.5, /3 или /3.5, но, с точки зрения использования ресурсов, легче умножить на обратное число: х0.5, х0.4, х0.(3), х0.286) сбои уже четко прослеживаются. На низких частотах счетчик длительности импульса переполняется.
Повысим частоту до 200 Гц.
200 Гц х1:
 200 Гц х2:
200 Гц х2:
 200 Гц х3:
200 Гц х3:
 200 Гц х3.5:
200 Гц х3.5:
 200 Гц х2.5:
200 Гц х2.5:
 Здесь уже не хватает скорости реакции программы (1 MIPS) на обработку всех задач.
Здесь уже не хватает скорости реакции программы (1 MIPS) на обработку всех задач.
Так что работа вне заявленного в техническом задании диапазона от 0.6 до 100 Гц (на самом деле испытано от 0.5 до 150 Гц) не гарантирует достаточной точности.
Схема:

3D модель:



Плата обработана специальным лаком, сберегает стены от сырости, нас от ревматизма:

Говорят, он светится в УФ-лучах, но такой лампы не нашлось:

В корпусе, внешние размеры 66х46х22 мм:

Диапазон частот входного сигнала с датчика скорости: от 0.6 до 100 Гц, что примерно соответствует скорости от 0 до 150 км/ч.
Проводим испытания, на входе генератор сигналов, на выходе осциллограф.
Например, осциллограммы на 10 Гц и 100 Гц.Синий канал - входной сигнал, желтый - выходной.
10 Гц х1:





100 Гц х2:




Испытываем за границами рабочего диапазона, 0.1 Гц, ну оооооочень медленная скорость, в программе счетчик должен переполняться и будут сбои в работе.
0.1 Гц х1:

0.1 Гц х2:




Повысим частоту до 200 Гц.
200 Гц х1:





Так что работа вне заявленного в техническом задании диапазона от 0.6 до 100 Гц (на самом деле испытано от 0.5 до 150 Гц) не гарантирует достаточной точности.
Комментариев нет:
Отправить комментарий